Info del Campo
Hybrid Rescue Campo de Competición
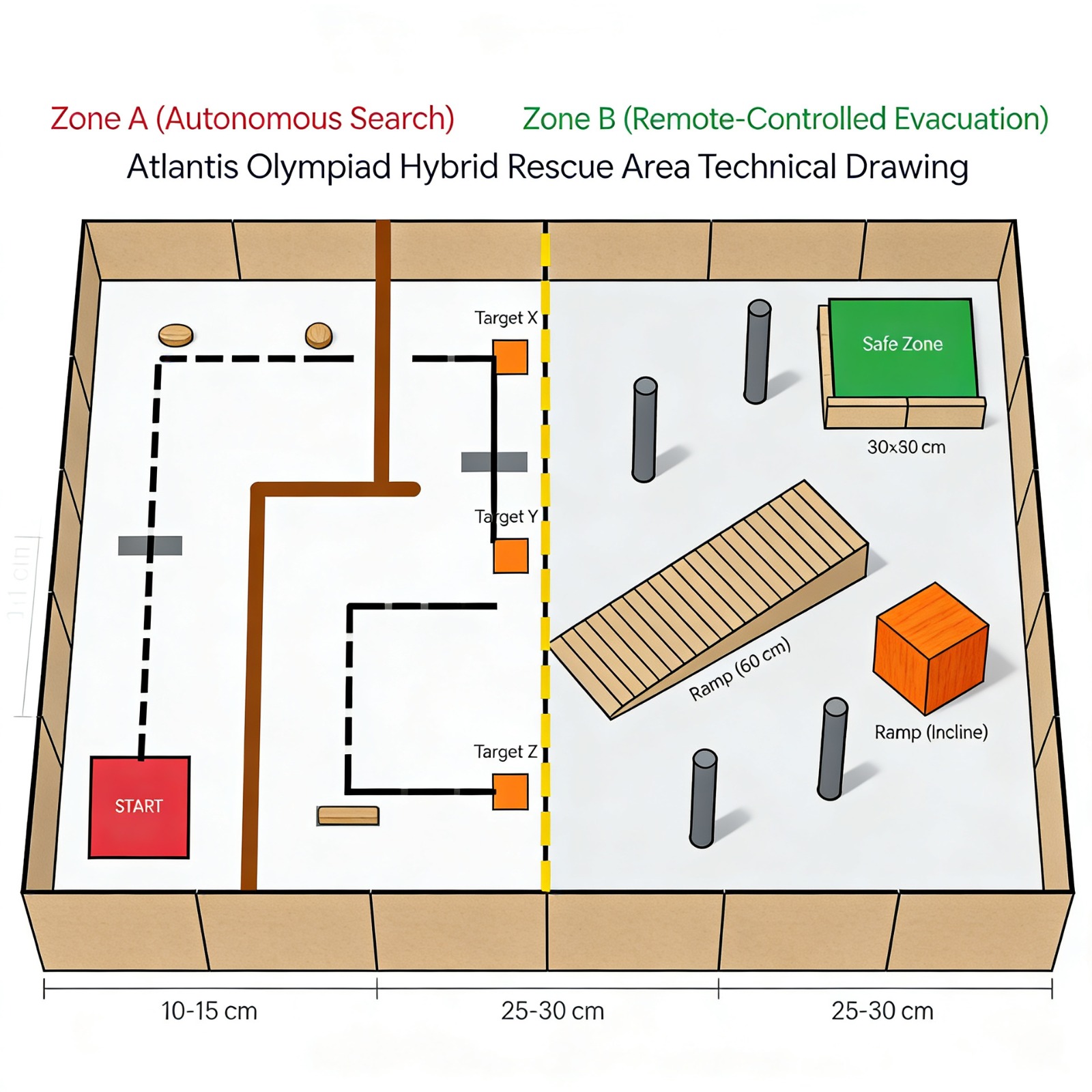
Un campo híbrido de búsqueda y rescate sobre una base de MDF o madera de 200×300 cm. Una línea amarilla fluorescente de 5 cm de ancho en el centro (a 150 cm) separa la Zona A (Búsqueda Autónoma) de la Zona B (Evacuación por Control Remoto).
Todo el perímetro está rodeado por paredes de 15 cm de alto en negro mate o blanco. El robot primero localiza autónomamente a la víctima, luego el operador toma el control para la evacuación.
Campo: 200 × 300 cm — Zona A 200×150 cm | Zona B 200×150 cm